top of page
Lite Kit Robotic Platform
This project aimed to develop an autonomous robot platform capable of being modified to fulfill different functions based on different tasks given.
This was a project that I undertook during my first year in University. Throughout the year, we were given assignments to modify and program the robot to do different tasks, such as Omnidirectional movement, object tracking and Ball retrieval and kicking.
Part 1
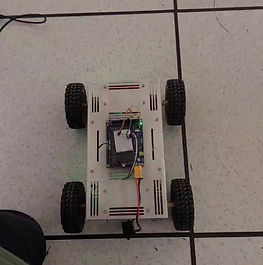
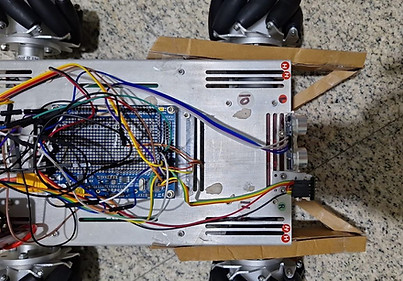
At first, Our assignment was simple: Build a wheel robot and program it to the the basic movements of forward, left, right back.

Part 2
Ultrasonic sensors were then added, adding a new function for the robot to fulfill, to prevent the robot from colliding with obstacles
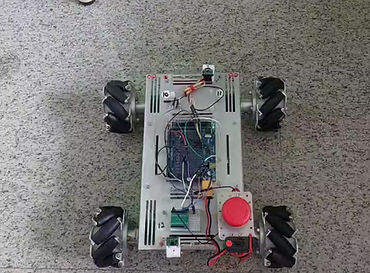
The next assignment was to replace the rubber wheels with Omnidirectional Mecanum wheels, and program new movements for the robot

Part 3
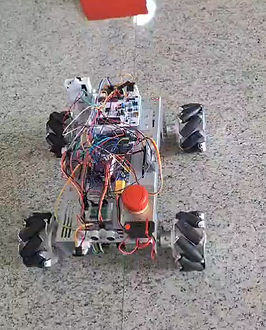
We were eventually assigned to add a object tracking function to the robot, where we used a PIxycam Camera to detect and follow colored paper

Part 4
Another assignment we were given was the development of an attachment that can collect a tennis ball, move it to another location, and kick the ball
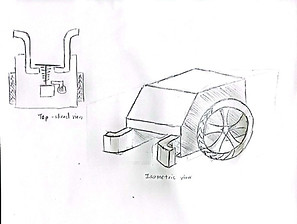
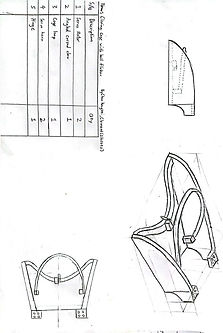
Ideation Sketches for the solution
After decided on most viable idea, I went about creating a prototype using cardboard, and moved on to fabricating the design with alumunium and 3D printed components

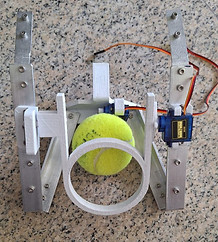
Final Product and Video


bottom of page