top of page
Autonomous Mobile Robot (AMR)
This project aimed to improve the efficiency of a logistics warehouse by developing an autonomous mobile robot (AMR) Forklift to carry pallets from one point to another.
We started with sketches and discussed possible functional designs for the robot.
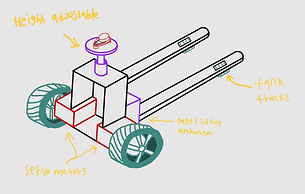
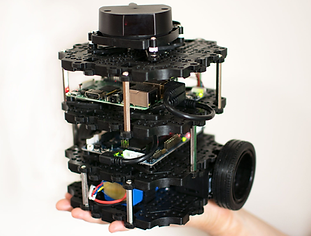
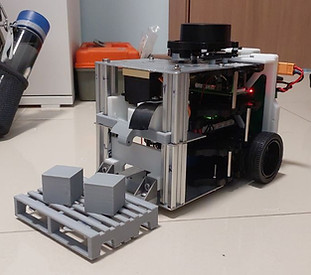
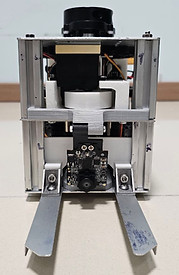
We eventually settled on the Turtlebot3 robot as our base machine and proceeded to build the lifting mechanism.
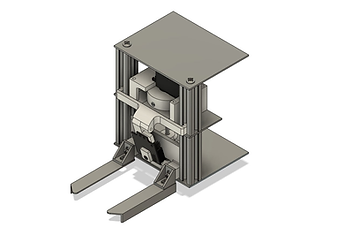
We made a initial 3D model of the lifting mechanism, using a combination of Off-the-shelf and 3D printed parts.
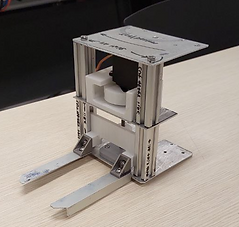
We then assembled the final robot and began program testing utilising a combination of LIDAR and pixycam to detect the pallet
Final testing video

bottom of page